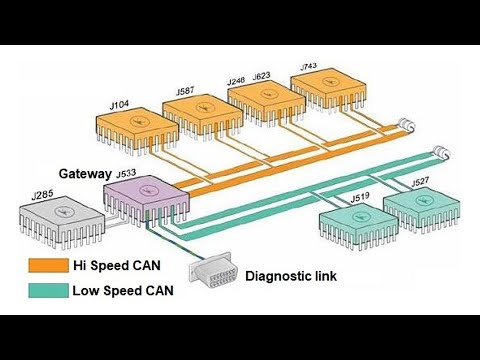
Каким типом верёвок связать электронные компоненты робота? Мне подошёл UART. А что из перечисленных или оставленных за кадром протоколов лучше решит именно вашу задачу? Другие видео проекта в этом плейлисте: Две платы STM32 Blue Pill необходимо связать с Orange Pi 3B (та же задача стояла бы и для связи Raspberry Pi, Banana Pi или другого микрокомпьютера на Linux под управлением ROS2. 00:00 О чём пойдёт речь? 00:12 Структурная схема робота 00:31 Варианты подключения компонент 01:01 Принципы выбора протокола 01:28 Якоря. Фиксированные допущения 01:48 USB 02:33 CAN 03:16 I2C 04:31 UART 05:15 Финал Все исходники проекта - Продолжение: #arduino #raspberrypi #realsense #ros2
- 6380Просмотров
- 11 месяцев назадОпубликованоOleg Milantiev
I2C, UART, CAN: Какой протокол я выбрал для своего робота на Orange Pi и STM32? 🤖 #stm32 #orangepi
Похожее видео








Популярное
Новини