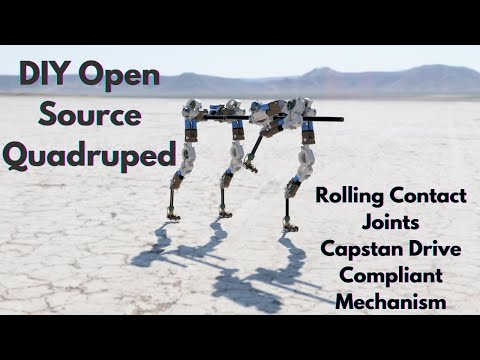
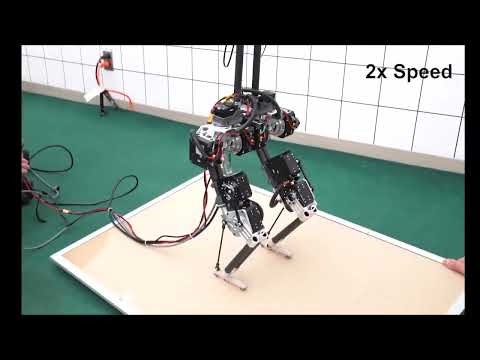
I built this bipedal robot using second hand hobby brushless motors, a custom designed ESP32 based FOC controller for motor controls, and a Teensy 4.0 as main controller. Part of the build was done on vacation while i was at my parents house so the background is very messy lol. The next phase of the development will be designing and implementing an MPC controller for full body control.
- 146019Просмотров
- 1 год назадОпубликованоQihaoGuo
Miniature bipedal robot hardware platform using brushless motors.
Похожее видео








Популярное
Новини